
转载请声明出处哦~,本篇文章发布于luozhiyun的博客:https://www.luozhiyun.com
源码版本是1.19
kubelet信息量是很大的,通过我这一篇文章肯定是讲不全的,大家可以根据自己的情况到Reference或文章的链接补录自己缺失的知识。
kubelet 主要功能
在kubernetes集群中,每个Node节点都会启动kubelet进程,用来处理Master节点下发到本节点的任务,管理Pod和其中的容器。
pod 管理
Kubelet 以 PodSpec 的方式工作。PodSpec 是描述一个 Pod 的 YAML 或 JSON 对象。 kubelet 采用一组通过各种机制提供的 PodSpecs(主要通过 apiserver),并确保这些 PodSpecs 中描述的 Pod 正常健康运行。
官方提供了4中方式来获取容器信息:
- apiserver:通过 API Server 监听 etcd 目录获取数据;
- File:启动参数 –config 指定的配置目录下的文件;
- 通过 url 从网络上某个地址来获取信息
拿apiserver来说,如果Kubelet 监听到etcd中有新的绑定到本节点的 Pod,则按照 Pod 清单的要求创建该 Pod;如果发现本地的 Pod 被修改,则 Kubelet 会做出相应的修改。
容器健康检查
容器健康检查这个我们在前面已经聊过,主要是通过LivenessProbe 与ReadinessProbe来判断容器是否健康。
- LivenessProbe :用于判断容器是否健康,告诉 Kubelet 一个容器什么时候处于不健康的状态。如果 LivenessProbe 探针探测到容器不健康,则 Kubelet 将删除该容器,并根据容器的重启策略做相应的处理。如果一个容器不包含 LivenessProbe 探针,那么 Kubelet 认为该容器的 LivenessProbe 探针返回的值永远是 “Success”;
- ReadinessProbe:用于判断容器是否启动完成且准备接收请求。如果 ReadinessProbe 探针探测到失败,则 Pod 的状态将被修改。Endpoint Controller 将从 Service 的 Endpoint 中删除包含该容器所在 Pod 的 IP 地址的 Endpoint 条目。
容器监控
Kubelet 通过 cAdvisor 获取其所在节点及容器的数据。cAdvisor 是一个开源的分析容器资源使用率和性能特性的代理工具,集成到 Kubelet中,当Kubelet启动时会同时启动cAdvisor,且一个cAdvisor只监控一个Node节点的信息。cAdvisor 自动查找所有在其所在节点上的容器,自动采集 CPU、内存、文件系统和网络使用的统计信息。cAdvisor 通过它所在节点机的 Root 容器,采集并分析该节点机的全面使用情况。
kubelet 工作原理
这里借用网上的一张图来说明情况:
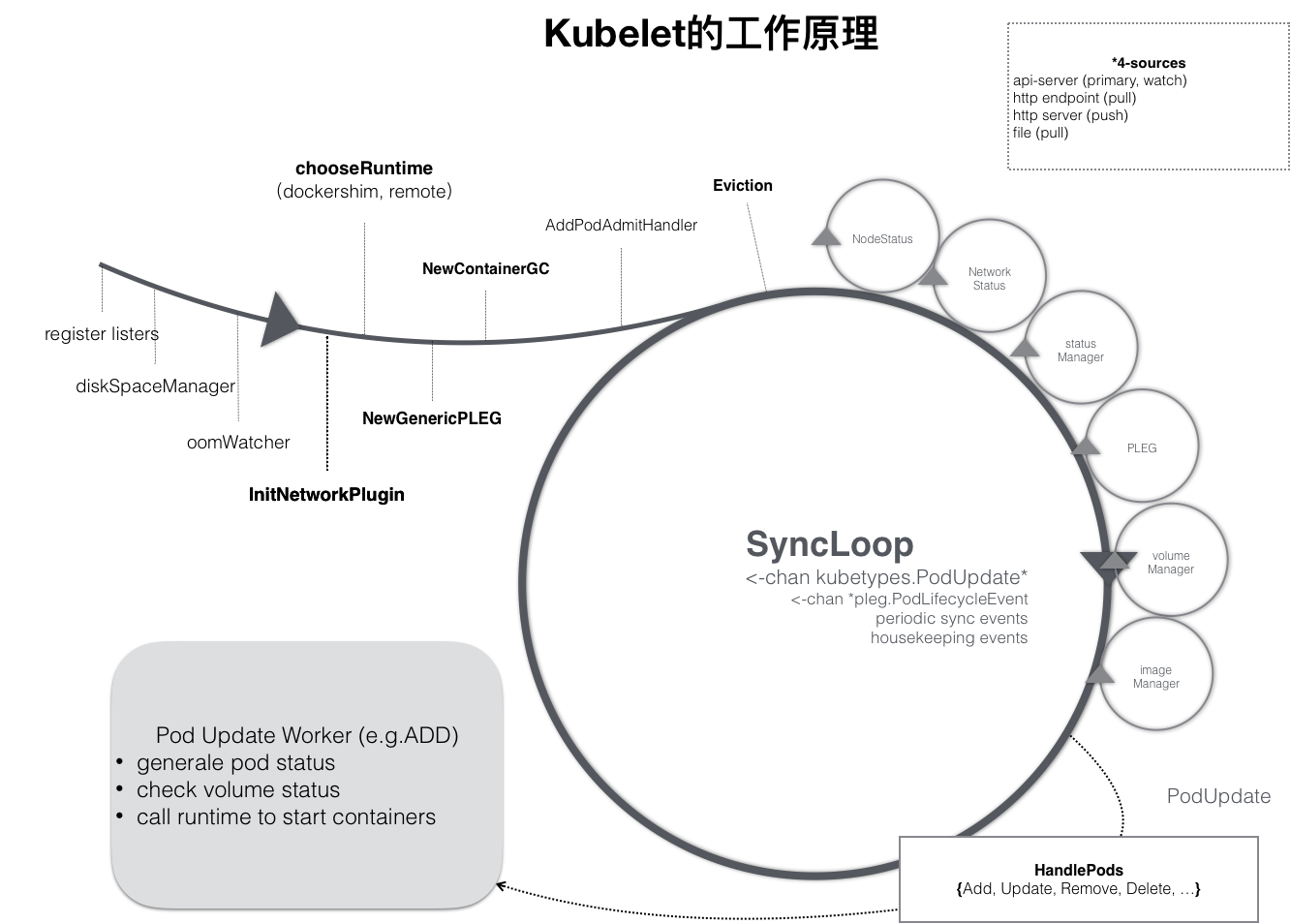
由图我们可以看到kubelet 的工作核心,就是一个控制循环,即:SyncLoop。驱动整个控制循环的事件有:pod更新事件、pod生命周期变化、kubelet本身设置的执行周期、定时清理事件等。
在SyncLoop循环上还有很多xxManager,例如probeManager 会定时去监控 pod 中容器的健康状况,当前支持两种类型的探针:livenessProbe 和readinessProbe;statusManager 负责维护状态信息,并把 pod 状态更新到 apiserver;containerRefManager 容器引用的管理,相对简单的Manager,用来报告容器的创建,失败等事件等等。
kubelet 调用下层容器运行时的执行过程,并不会直接调用 Docker 的 API,而是通过一组叫作 CRI(Container Runtime Interface,容器运行时接口)的 gRPC 接口来间接执行的。
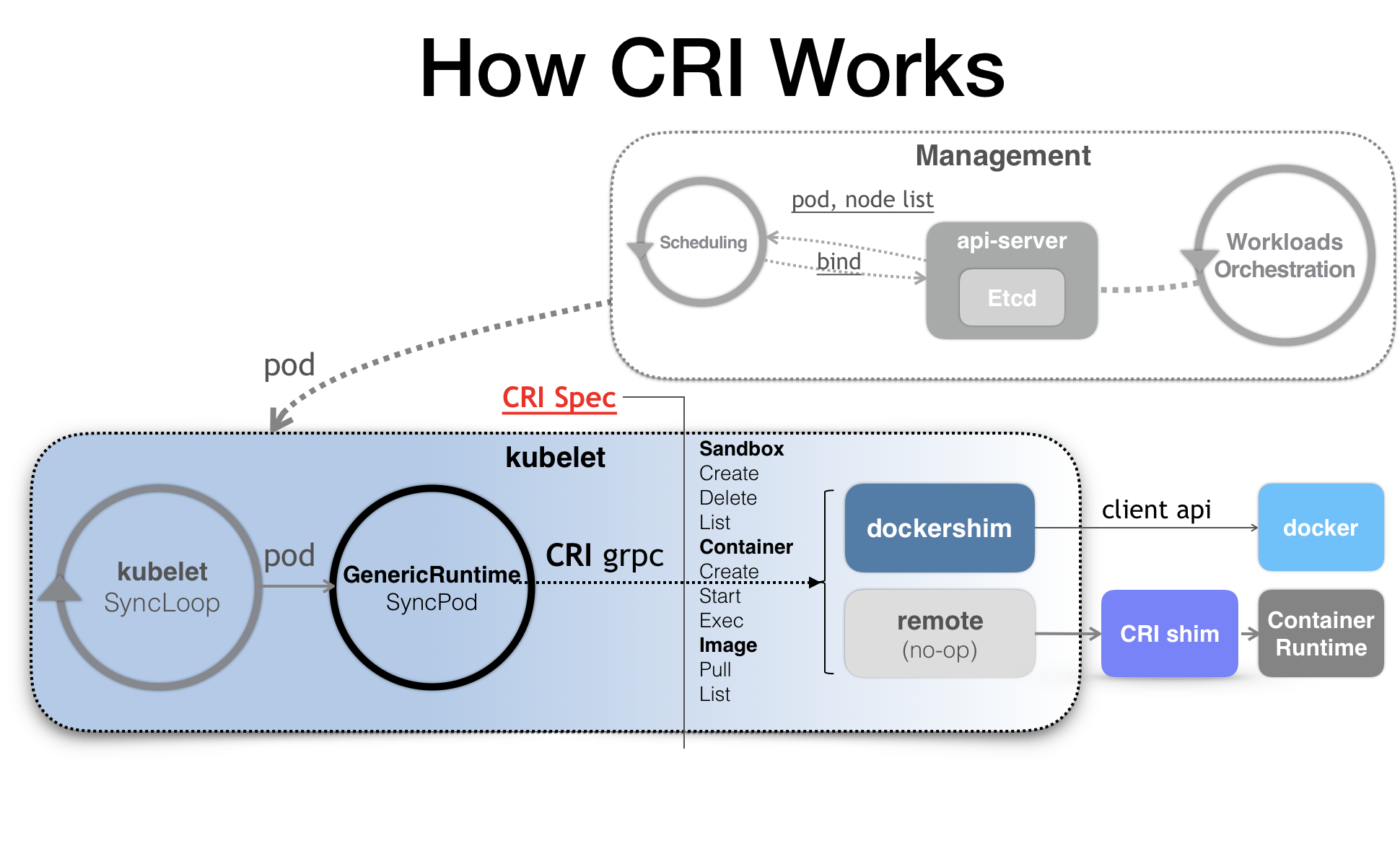
CRI是k8s对容器的操作抽离出的一系列的接口,kubelet 就只需要跟这个接口打交道,而不需要关注底层的容器时docker还是rkt,底层的容器只需要自己提供一个该接口的实现,然后对 kubelet 暴露出 gRPC 服务即可。有关CRI的可以内容可以看看这篇:Introducing Container Runtime Interface。
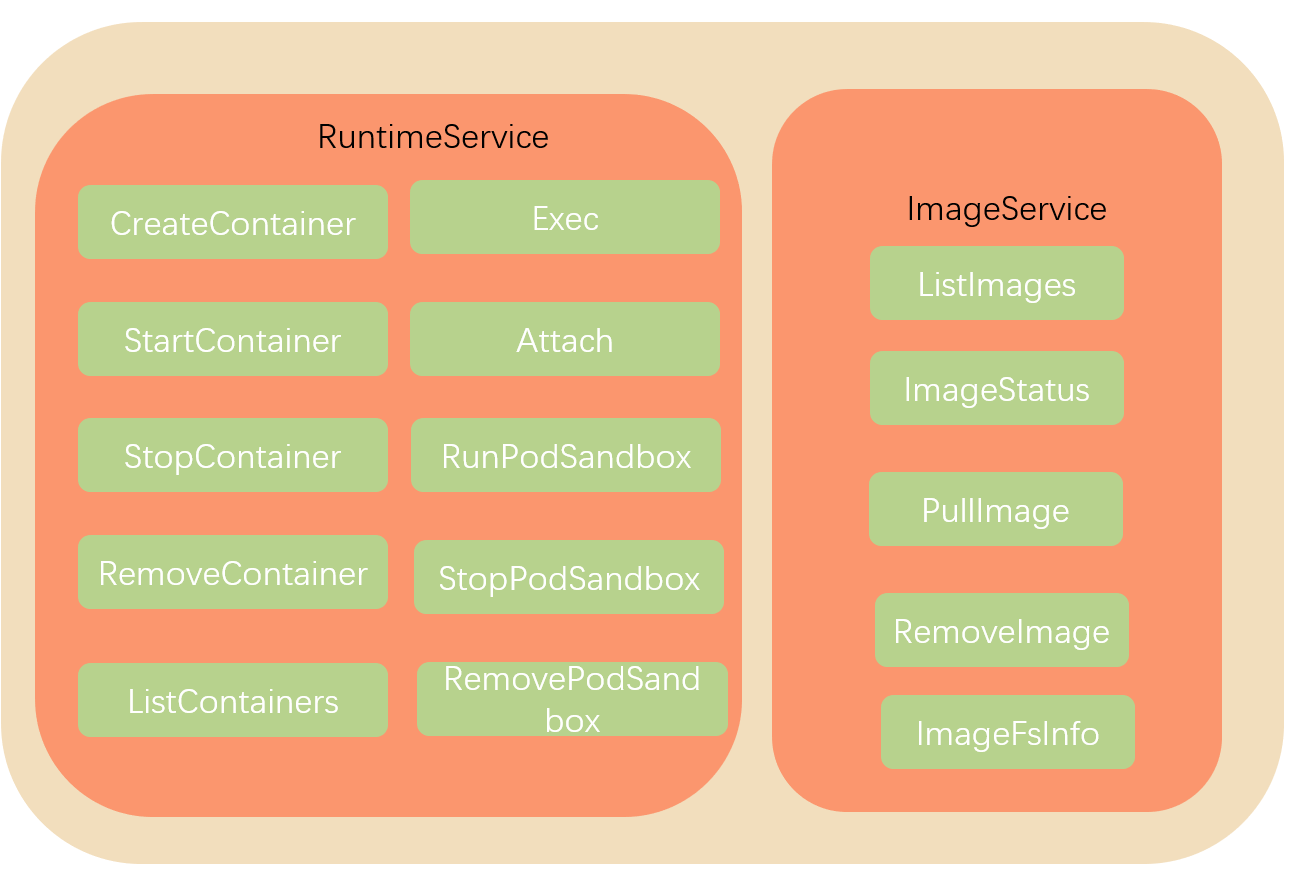
一般来说CRI接口可以分为两组:
一组是ImageService,主要是容器镜像相关的操作,比如拉取镜像、删除镜像等。
另一组是RuntimeService,主要是跟容器相关的操作,比如创建、启动、删除Container、Exec等。
如下图(没有列全):
kubelet执行源码分析
Run
文件地址:kubernetes\pkg\kubelet\kubelet.go
func (kl *Kubelet) Run(updates <-chan kubetypes.PodUpdate) {
//注册 logServer
if kl.logServer == nil {
kl.logServer = http.StripPrefix("/logs/", http.FileServer(http.Dir("/var/log/")))
}
if kl.kubeClient == nil {
klog.Warning("No api server defined - no node status update will be sent.")
}
//Cloud Provider 扩展相关:https://kubernetes.feisky.xyz/extension/cloud-provider
if kl.cloudResourceSyncManager != nil {
go kl.cloudResourceSyncManager.Run(wait.NeverStop)
}
//调用 kl.initializeModules 首先启动不依赖 container runtime 的一些模块
if err := kl.initializeModules(); err != nil {
kl.recorder.Eventf(kl.nodeRef, v1.EventTypeWarning, events.KubeletSetupFailed, err.Error())
klog.Fatal(err)
}
//启动 volume manager
go kl.volumeManager.Run(kl.sourcesReady, wait.NeverStop)
if kl.kubeClient != nil {
//执行 kl.syncNodeStatus 定时同步 Node 状态
go wait.Until(kl.syncNodeStatus, kl.nodeStatusUpdateFrequency, wait.NeverStop)
//调用 kl.fastStatusUpdateOnce 更新容器运行时启动时间以及执行首次状态同步
go kl.fastStatusUpdateOnce()
// start syncing lease
//NodeLease 机制
go kl.nodeLeaseController.Run(wait.NeverStop)
}
//执行 kl.updateRuntimeUp 定时更新 Runtime 状态
go wait.Until(kl.updateRuntimeUp, 5*time.Second, wait.NeverStop)
// Set up iptables util rules
//执行 kl.syncNetworkUtil 定时同步 iptables 规则
if kl.makeIPTablesUtilChains {
kl.initNetworkUtil()
}
//获取 pk.podKillingCh异常pod, 并定时清理异常 pod
go wait.Until(kl.podKiller.PerformPodKillingWork, 1*time.Second, wait.NeverStop)
// Start component sync loops.
//启动 statusManager、probeManager、runtimeClassManager
kl.statusManager.Start()
kl.probeManager.Start()
// Start syncing RuntimeClasses if enabled.
if kl.runtimeClassManager != nil {
kl.runtimeClassManager.Start(wait.NeverStop)
}
// Start the pod lifecycle event generator.
//启动 pleg 该模块主要用于周期性地向 container runtime 刷新当前所有容器的状态
//https://github.com/kubernetes/community/blob/master/contributors/design-proposals/node/pod-lifecycle-event-generator.md
kl.pleg.Start()
kl.syncLoop(updates, kl)
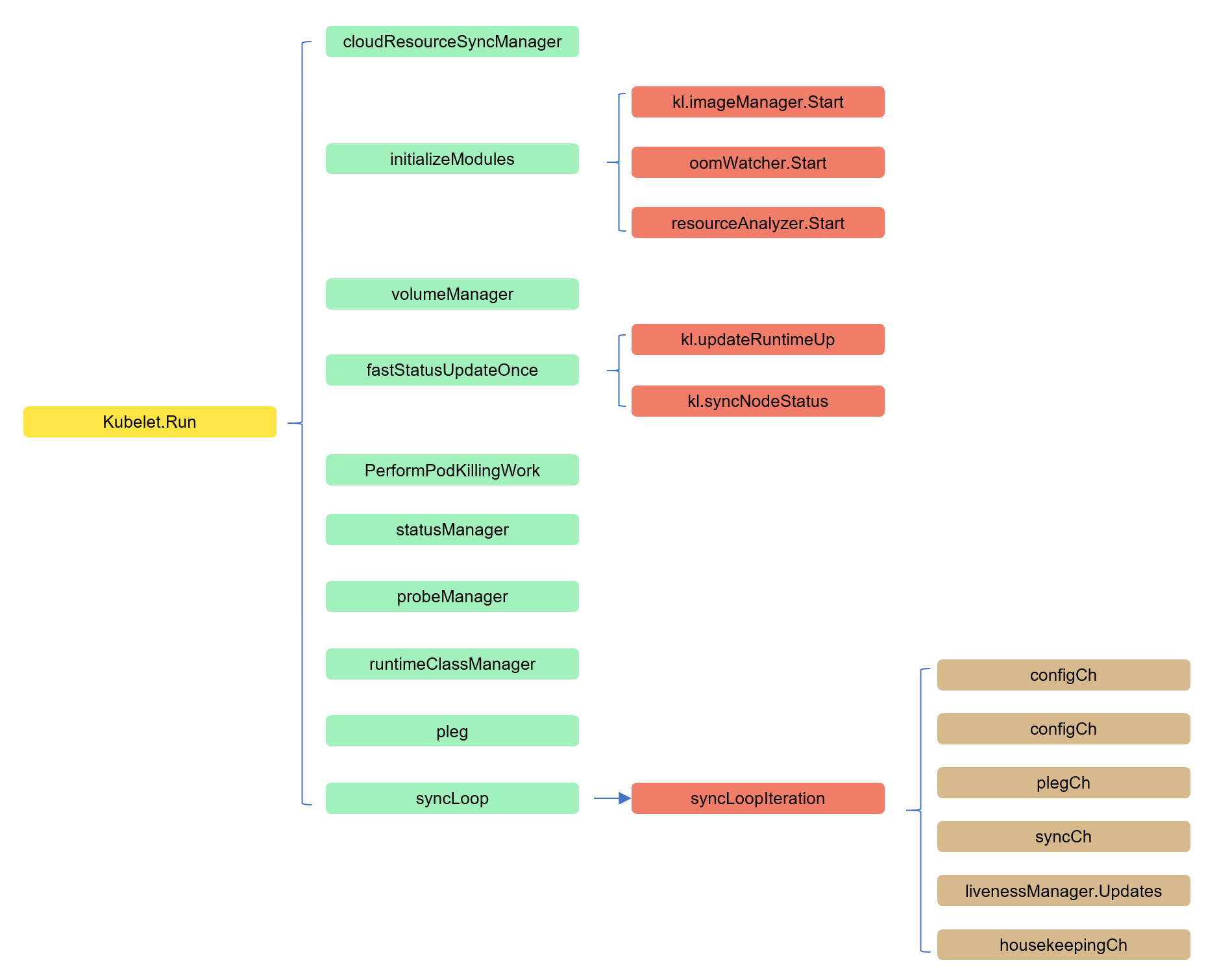
}这个方法会做以下事情:
- 注册logServer;
- 如果设置了Cloud Provider,那么会启动云资源管理器,具体的可以查看文章:cloud-provider;
- 调用kl.initializeModules启动不依赖 container runtime 的一些模块,这个方法我们下面再分析;
- 启动 volume manager;
- 执行 kl.syncNodeStatus 定时同步 Node 状态;
- 调用kl.fastStatusUpdateOnce启动一个循环更新pod CIDR、runtime状态以及node状态;
- 调用kl.nodeLeaseController.Run启动NodeLease机制,NodeLease机制是一种上报心跳的方式,可以通过更加轻量化节约资源的方式,并提升性能上报node的心跳信息,具体看: Lease object;
- 执行 kl.updateRuntimeUp 定时更新 Runtime 状态;
- 执行 kl.syncNetworkUtil 定时同步 iptables 规则;
- 获取 pk.podKillingCh异常pod, 并定时清理异常 pod;
- 然后启动 statusManager、probeManager、runtimeClassManager;
- 启动 pleg模块,该模块主要用于周期性地向 container runtime 上报当前所有容器的状态,具体可以看:Pod Lifecycle Event Generator (PLEG);
- 调用kl.syncLoop启动kublet事件循环;
initializeModules
下面我们看看initializeModules方法做了些什么。
func (kl *Kubelet) initializeModules() error {
...
//创建文件目录
if err := kl.setupDataDirs(); err != nil {
return err
}
//创建 ContainerLogsDir
if _, err := os.Stat(ContainerLogsDir); err != nil {
if err := kl.os.MkdirAll(ContainerLogsDir, 0755); err != nil {
return fmt.Errorf("failed to create directory %q: %v", ContainerLogsDir, err)
}
}
//启动 imageManager
kl.imageManager.Start()
//启动 certificate manager ,证书相关
if kl.serverCertificateManager != nil {
kl.serverCertificateManager.Start()
}
//启动 oomWatcher.
if err := kl.oomWatcher.Start(kl.nodeRef); err != nil {
return fmt.Errorf("failed to start OOM watcher %v", err)
}
//启动 resource analyzer,刷新volume stats到缓存中
kl.resourceAnalyzer.Start()
return nil
}initializeModules方法主要做了以下几件事:
- 创建创建文件目录、Container的log目录;
- 启动 imageManager,这个管理器实际上是realImageGCManager,我们待会看;
- 启动 certificate manager ,证书相关;
- 启动 oomWatcher监视器;
- 启动 resource analyzer,定时刷新volume stats到缓存中;
realImageGCManager#Start
文件路径:pkg/kubelet/images/image_gc_manager.go
func (im *realImageGCManager) Start() {
go wait.Until(func() {
var ts time.Time
if im.initialized {
ts = time.Now()
}
//找出所有的image,并删除不再使用的image
_, err := im.detectImages(ts)
if err != nil {
klog.Warningf("[imageGCManager] Failed to monitor images: %v", err)
} else {
im.initialized = true
}
}, 5*time.Minute, wait.NeverStop)
//更新image的缓存
go wait.Until(func() {
//调用容器接口,获取最新的image
images, err := im.runtime.ListImages()
if err != nil {
klog.Warningf("[imageGCManager] Failed to update image list: %v", err)
} else {
im.imageCache.set(images)
}
}, 30*time.Second, wait.NeverStop)
}realImageGCManager的start方法会启动两个协程,然后分别定时调用detectImages方法与imageCache的set方法。detectImages方法里面主要就是调用ImageService和RuntimeService的方法找出所有正在使用的image,然后删除不再使用的image。
这里ListImages和detectImages里面用到的GetPods方法都是调用了CRI的方法,
fastStatusUpdateOnce
func (kl *Kubelet) fastStatusUpdateOnce() {
for {
time.Sleep(100 * time.Millisecond)
node, err := kl.GetNode()
if err != nil {
klog.Errorf(err.Error())
continue
}
if len(node.Spec.PodCIDRs) != 0 {
podCIDRs := strings.Join(node.Spec.PodCIDRs, ",")
if _, err := kl.updatePodCIDR(podCIDRs); err != nil {
klog.Errorf("Pod CIDR update to %v failed %v", podCIDRs, err)
continue
}
//更新 Runtime 状态
kl.updateRuntimeUp()
//更新 节点 状态
kl.syncNodeStatus()
return
}
}
}FastStatusUpdateOnce 函数启动一个循环,尝试立即更新POD CIDR。更新pod CIDR后,它会触发运行时更新和节点状态更新。函数在一次成功的节点状态更新后直接返回。该功能仅在 kubelet 启动期间执行,通过尽快更新 pod cidr、运行时状态和节点状态来提高准备就绪节点的延迟。
updateRuntimeUp
//首次执行的时候会初始化runtime依赖模块,然后更新runtimeState
func (kl *Kubelet) updateRuntimeUp() {
kl.updateRuntimeMux.Lock()
defer kl.updateRuntimeMux.Unlock()
//获取 containerRuntime Status
s, err := kl.containerRuntime.Status()
if err != nil {
klog.Errorf("Container runtime sanity check failed: %v", err)
return
}
if s == nil {
klog.Errorf("Container runtime status is nil")
return
}
klog.V(4).Infof("Container runtime status: %v", s)
//检查 network 和 runtime 是否处于 ready 状态
networkReady := s.GetRuntimeCondition(kubecontainer.NetworkReady)
if networkReady == nil || !networkReady.Status {
klog.Errorf("Container runtime network not ready: %v", networkReady)
kl.runtimeState.setNetworkState(fmt.Errorf("runtime network not ready: %v", networkReady))
} else {
// Set nil if the container runtime network is ready.
kl.runtimeState.setNetworkState(nil)
}
// information in RuntimeReady condition will be propagated to NodeReady condition.
//获取运行时状态
runtimeReady := s.GetRuntimeCondition(kubecontainer.RuntimeReady)
// If RuntimeReady is not set or is false, report an error.
if runtimeReady == nil || !runtimeReady.Status {
err := fmt.Errorf("Container runtime not ready: %v", runtimeReady)
klog.Error(err)
kl.runtimeState.setRuntimeState(err)
return
}
kl.runtimeState.setRuntimeState(nil)
//调用 kl.initializeRuntimeDependentModules 启动依赖模块
kl.oneTimeInitializer.Do(kl.initializeRuntimeDependentModules)
kl.runtimeState.setRuntimeSync(kl.clock.Now())
}updateRuntimeUp会获取container运行状态信息,然后根据返回RuntimeStatus检查网络、runtime是不是已经处于ready状态;接着调用kl.initializeRuntimeDependentModules初始化依赖模块,这里会启动cadvisor、containerManager、evictionManager、containerLogManager、pluginManager;最后设置Runtime同步时间。
最后看看syncLoop方法
syncLoop
func (kl *Kubelet) syncLoop(updates <-chan kubetypes.PodUpdate, handler SyncHandler) {
...
syncTicker := time.NewTicker(time.Second)
defer syncTicker.Stop()
housekeepingTicker := time.NewTicker(housekeepingPeriod)
defer housekeepingTicker.Stop()
plegCh := kl.pleg.Watch()
for {
...
kl.syncLoopMonitor.Store(kl.clock.Now())
if !kl.syncLoopIteration(updates, handler, syncTicker.C, housekeepingTicker.C, plegCh) {
break
}
kl.syncLoopMonitor.Store(kl.clock.Now())
}
}syncLoop方法在一个循环中不断的调用syncLoopIteration方法执行主要逻辑。
syncLoopIteration
syncLoopIteration方法比较长,拆开来看。
syncCh
func (kl *Kubelet) syncLoopIteration(configCh <-chan kubetypes.PodUpdate, handler SyncHandler,
//方法会监听多个 channel,当发现任何一个 channel 有数据就交给 handler 去处理,在 handler 中通过调用 dispatchWork 分发任务
syncCh <-chan time.Time, housekeepingCh <-chan time.Time, plegCh <-chan *pleg.PodLifecycleEvent) bool {
select {
//该模块将同时 watch 3 个不同来源的 pod 信息的变化(file,http,apiserver),
//一旦某个来源的 pod 信息发生了更新(创建/更新/删除),这个 channel 中就会出现被更新的 pod 信息和更新的具体操作;
case u, open := <-configCh:
if !open {
klog.Errorf("Update channel is closed. Exiting the sync loop.")
return false
}
switch u.Op {
case kubetypes.ADD:
klog.V(2).Infof("SyncLoop (ADD, %q): %q", u.Source, format.Pods(u.Pods))
handler.HandlePodAdditions(u.Pods)
case kubetypes.UPDATE:
klog.V(2).Infof("SyncLoop (UPDATE, %q): %q", u.Source, format.PodsWithDeletionTimestamps(u.Pods))
handler.HandlePodUpdates(u.Pods)
case kubetypes.REMOVE:
klog.V(2).Infof("SyncLoop (REMOVE, %q): %q", u.Source, format.Pods(u.Pods))
handler.HandlePodRemoves(u.Pods)
case kubetypes.RECONCILE:
klog.V(4).Infof("SyncLoop (RECONCILE, %q): %q", u.Source, format.Pods(u.Pods))
handler.HandlePodReconcile(u.Pods)
case kubetypes.DELETE:
klog.V(2).Infof("SyncLoop (DELETE, %q): %q", u.Source, format.Pods(u.Pods))
handler.HandlePodUpdates(u.Pods)
case kubetypes.SET:
klog.Errorf("Kubelet does not support snapshot update")
default:
klog.Errorf("Invalid event type received: %d.", u.Op)
}
kl.sourcesReady.AddSource(u.Source)
...
}configCh读取配置事件的管道,该模块将同时 watch 3 个不同来源的 pod 信息的变化(file,http,apiserver),一旦某个来源的 pod 信息发生了更新(创建/更新/删除),这个 channel 中就会出现被更新的 pod 信息和更新的具体操作。这里对于pod的操作我们下一篇再讲。
plegCh
func (kl *Kubelet) syncLoopIteration(configCh <-chan kubetypes.PodUpdate, handler SyncHandler,
//方法会监听多个 channel,当发现任何一个 channel 有数据就交给 handler 去处理,在 handler 中通过调用 dispatchWork 分发任务
syncCh <-chan time.Time, housekeepingCh <-chan time.Time, plegCh <-chan *pleg.PodLifecycleEvent) bool {
...
case e := <-plegCh:
if e.Type == pleg.ContainerStarted {
kl.lastContainerStartedTime.Add(e.ID, time.Now())
}
if isSyncPodWorthy(e) {
if pod, ok := kl.podManager.GetPodByUID(e.ID); ok {
klog.V(2).Infof("SyncLoop (PLEG): %q, event: %#v", format.Pod(pod), e)
handler.HandlePodSyncs([]*v1.Pod{pod})
} else {
klog.V(4).Infof("SyncLoop (PLEG): ignore irrelevant event: %#v", e)
}
}
if e.Type == pleg.ContainerDied {
if containerID, ok := e.Data.(string); ok {
kl.cleanUpContainersInPod(e.ID, containerID)
}
}
...
}PLEG.Start的时候会每秒钟启动调用一次relist,根据最新的PodStatus生成PodLiftCycleEvent,然后存入到PLE Channel中。
syncLoop会调用pleg.Watch方法获取PLE Channel管道,然后传给syncLoopIteration方法,在syncLoopIteration方法中也就是plegCh这个管道,syncLoopIteration会消费plegCh中的数据,在 handler 中通过调用 dispatchWork 分发任务。
syncCh
func (kl *Kubelet) syncLoopIteration(configCh <-chan kubetypes.PodUpdate, handler SyncHandler,
syncCh <-chan time.Time, housekeepingCh <-chan time.Time, plegCh <-chan *pleg.PodLifecycleEvent) bool {
...
// 每秒钟会执行到一次
case <-syncCh:
// Sync pods waiting for sync
podsToSync := kl.getPodsToSync()
if len(podsToSync) == 0 {
break
}
klog.V(4).Infof("SyncLoop (SYNC): %d pods; %s", len(podsToSync), format.Pods(podsToSync))
//同步最新保存的 pod 状态
handler.HandlePodSyncs(podsToSync)
...
}syncCh是由syncLoop方法里面创建的一个定时任务,每秒钟会向syncCh添加一个数据,然后就会执行到这里。这个方法会同步所有等待同步的pod。
livenessManager.Updates
func (kl *Kubelet) syncLoopIteration(configCh <-chan kubetypes.PodUpdate, handler SyncHandler,
syncCh <-chan time.Time, housekeepingCh <-chan time.Time, plegCh <-chan *pleg.PodLifecycleEvent) bool {
...
case update := <-kl.livenessManager.Updates():
//如果探针检测失败,需要更新pod的状态
if update.Result == proberesults.Failure {
pod, ok := kl.podManager.GetPodByUID(update.PodUID)
if !ok {
klog.V(4).Infof("SyncLoop (container unhealthy): ignore irrelevant update: %#v", update)
break
}
klog.V(1).Infof("SyncLoop (container unhealthy): %q", format.Pod(pod))
handler.HandlePodSyncs([]*v1.Pod{pod})
}
...
}对失败的pod或者liveness检查失败的pod进行sync操作。
housekeepingCh
func (kl *Kubelet) syncLoopIteration(configCh <-chan kubetypes.PodUpdate, handler SyncHandler,
syncCh <-chan time.Time, housekeepingCh <-chan time.Time, plegCh <-chan *pleg.PodLifecycleEvent) bool {
...
// 每两秒钟执行一次
case <-housekeepingCh:
if !kl.sourcesReady.AllReady() {
klog.V(4).Infof("SyncLoop (housekeeping, skipped): sources aren't ready yet.")
} else {
klog.V(4).Infof("SyncLoop (housekeeping)")
//执行一些清理工作,包括终止pod workers、删除不想要的pod,移除volumes、pod目录
if err := handler.HandlePodCleanups(); err != nil {
klog.Errorf("Failed cleaning pods: %v", err)
}
}
...
}housekeepingCh这个管道也是由syncLoop创建,每两秒钟会触发清理。
总结
kubelet.Run部分主要执行kubelet包含的各种manager的运行,大部分会以一部线程的方式定时运行。了解了CRI是怎么一回事,通过CRI接口可以做什么。
接下来看了syncLoop主函数,这个函数主要对pod的生命周期进行管理,包括对pod进行add 、update、remove、delete等操作,这些具体的代码执行过程留到下一篇,pod的初始化时再讲,syncLoop还需要更新根据不同的channel触发不同的操作,如更新runtime缓存、同步pod、触发清理pod、liveness检查失败的pod进行sync操作等。
Reference
https://kubernetes.io/docs/reference/command-line-tools-reference/kubelet/
https://developer.ibm.com/technologies/containers/blogs/kube-cri-overview/
https://kubernetes.io/docs/concepts/architecture/cloud-controller/
https://kubernetes.feisky.xyz/extension/cloud-provider
https://kubernetes.io/blog/2016/12/container-runtime-interface-cri-in-kubernetes/
https://zhuanlan.zhihu.com/p/110980720
https://kubernetes.io/docs/concepts/architecture/nodes/#heartbeats