转载请声明出处哦~,本篇文章发布于luozhiyun的博客:https://www.luozhiyun.com
本文使用的Istio源码是 release 1.5。
介绍
Discovery Service主要为数据面(运行在 sidecar 中的 Envoy 等 proxy 组件)提供控制信息服务。Discovery Service为数据面提供的信息叫做xds ,这里的 x 是一个代词,在 Istio 中,xds 包括 cds(cluster discovery service)、lds(listener discovery service)、rds(route discovery service)、eds(endpoint discovery service),而 ads(aggregated discovery service) 是对这些服务的一个统一封装。
Discovery Service中主要包含下述逻辑:
- 启动GRPC Server并接收来自Envoy端的连接请求;
- 接收Envoy端的xDS请求,从Config Controller和Service Controller中获取配置和服务信息,生成响应消息发送给Envoy;
- 监听来自Config Controller的配置变化和来自Service Controller的服务变化消息,并将配置和服务变化内容通过xDS接口推送到Envoy。
Discovery Service初始化
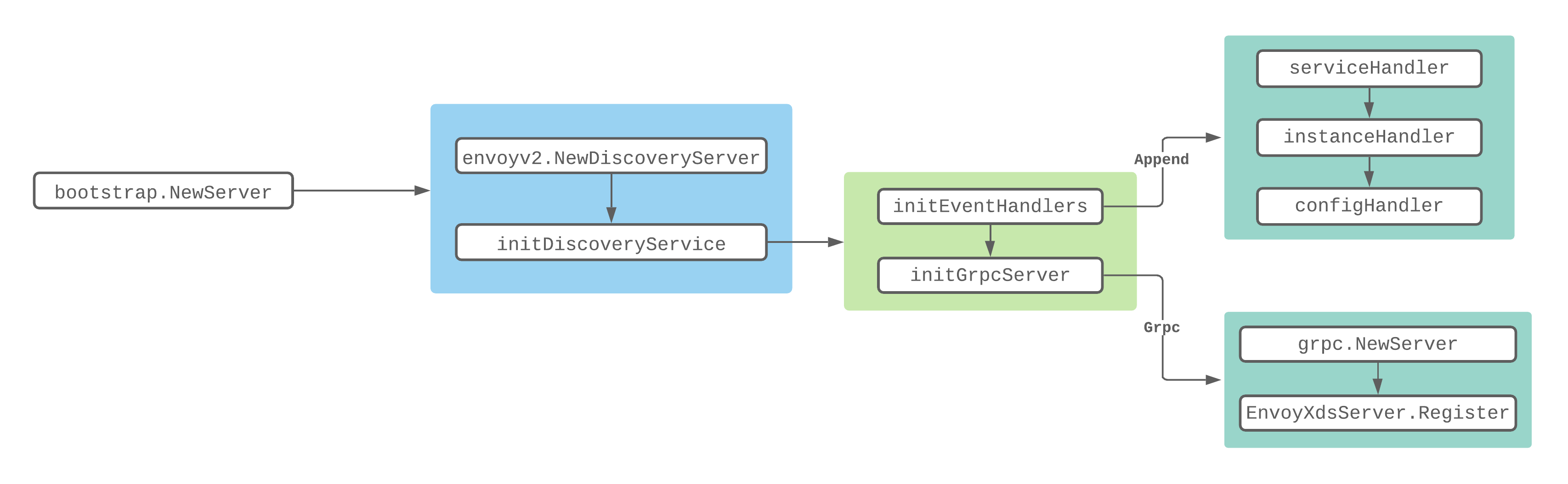
从上面的流程图可以知道,在调用NewServer创建XdsServer的时候会做很多初始化的工作。如初始化Pilot Server、网格初始化、初始化Istio Config的控制器、初始化Service Discovery的控制器等。我们下面列出和Discovery Service初始化相关的代码:
func NewServer(args *PilotArgs) (*Server, error) {
//创建Pilot Server
s := &Server{
basePort: args.BasePort,
clusterID: getClusterID(args),
environment: e,
//初始化XdsServer
EnvoyXdsServer: envoyv2.NewDiscoveryServer(e, args.Plugins),
forceStop: args.ForceStop,
mux: http.NewServeMux(),
}
...
//初始化xDS服务端
if err := s.initDiscoveryService(args); err != nil {
return nil, fmt.Errorf("discovery service: %v", err)
}
...
}从上面的代码可以看出XdsServer是通过调用NewDiscoveryServer方法来进行初始化的,返回的是一个DiscoveryServer实例,具体字段的使用会在后面说到。
type DiscoveryServer struct {
...
// Endpoint 的缓存,以服务名和 namespace 作为索引,主要用于 EDS 更新
EndpointShardsByService map[string]map[string]*EndpointShards
//统一接收其他组件发来的 PushRequest 的 channel
pushChannel chan *model.PushRequest
updateMutex sync.RWMutex
//pushQueue 主要是在真正 xDS 推送前做防抖缓存
pushQueue *PushQueue
}创建完Server后会调用initDiscoveryService方法:
func (s *Server) initDiscoveryService(args *PilotArgs) error {
...
//初始化Service Controller和Config Controller的Handler,用于informer回调
if err := s.initEventHandlers(); err != nil {
return err
}
...
// 会在初始化完毕之后调用Start方法,启动XdsServer
s.addStartFunc(func(stop <-chan struct{}) error {
s.EnvoyXdsServer.Start(stop)
return nil
})
//初始化Grpc Server服务,并注册到XdsServer中
s.initGrpcServer(args.KeepaliveOptions)
s.httpServer = &http.Server{
Addr: args.DiscoveryOptions.HTTPAddr,
Handler: s.mux,
}
...
}这个方法主要做了这么几件事:
- 初始化各种回调处理器;
- 将XdsServer启动函数添加到Server的startFuncs队列中,会在初始化完毕之后调用;
- 调用initGrpcServer方法初始化Grpc Server服务,并注册到XdsServer中。
在初始化 grpcServer 的时候,调用了 DiscoveryServer.Register() 方法,向 grpcServer 注册了以下几个服务:
func (s *DiscoveryServer) Register(rpcs *grpc.Server) {
//注册的时候传入grpc server 和 DiscoveryServer
ads.RegisterAggregatedDiscoveryServiceServer(rpcs, s)
}DiscoveryServer实际上实现了AggregatedDiscoveryServiceServer接口:
type AggregatedDiscoveryServiceServer interface {
// 全量 ADS Stream 接口
StreamAggregatedResources(AggregatedDiscoveryService_StreamAggregatedResourcesServer) error
// 增量 ADS Stream 接口
DeltaAggregatedResources(AggregatedDiscoveryService_DeltaAggregatedResourcesServer) error
}
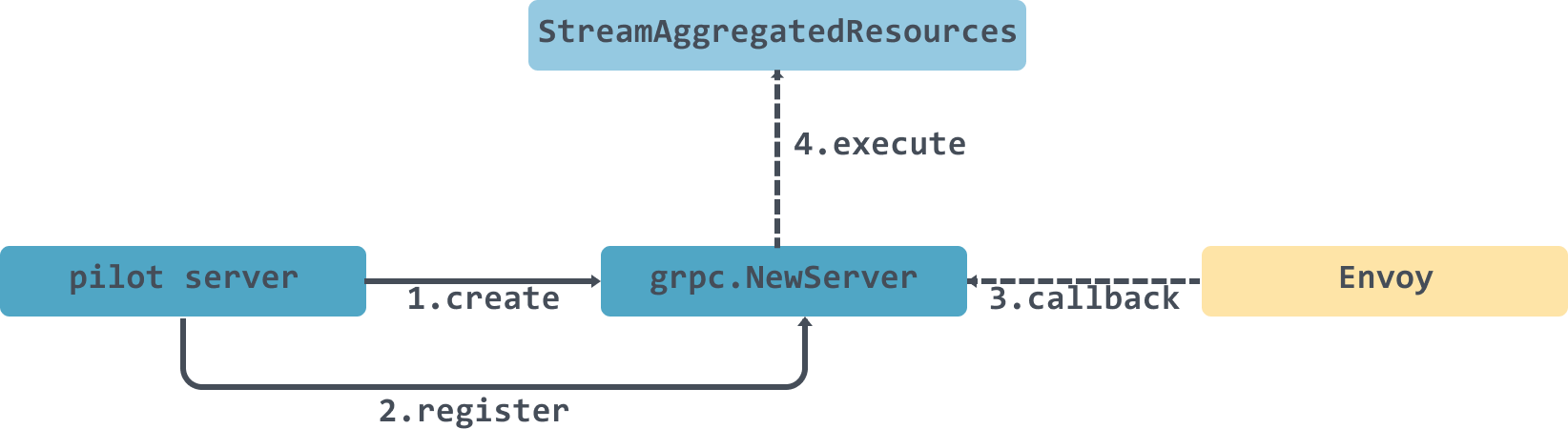
}StreamAggregatedResources 接收DiscoveryRequest ,返回 DiscoveryResponse 流,包含全量的 xDS 数据,DeltaAggregatedResources方法目前没有具体实现。
大致调用流程如下:
Discovery Service启动
discoveryServer.Start方法还是在pilot discovery的main方法中被调用。main方法会在调用完bootstrap.NewServer方法后,进行Start方法的调用:
discoveryCmd = &cobra.Command{
...
RunE: func(c *cobra.Command, args []string) error {
...
stop := make(chan struct{})
// 创建xDs服务器
discoveryServer, err := bootstrap.NewServer(&serverArgs)
if err != nil {
return fmt.Errorf("failed to create discovery service: %v", err)
}
// 启动服务器
if err := discoveryServer.Start(stop); err != nil {
return fmt.Errorf("failed to start discovery service: %v", err)
}
...
return nil
},
}在调用Start方法的时候会获取到Server的startFuncs集合,然后依次执行里面设置的函数:
func (s *Server) Start(stop <-chan struct{}) error {
// Now start all of the components.
for _, fn := range s.startFuncs {
if err := fn(stop); err != nil {
return err
}
}
...
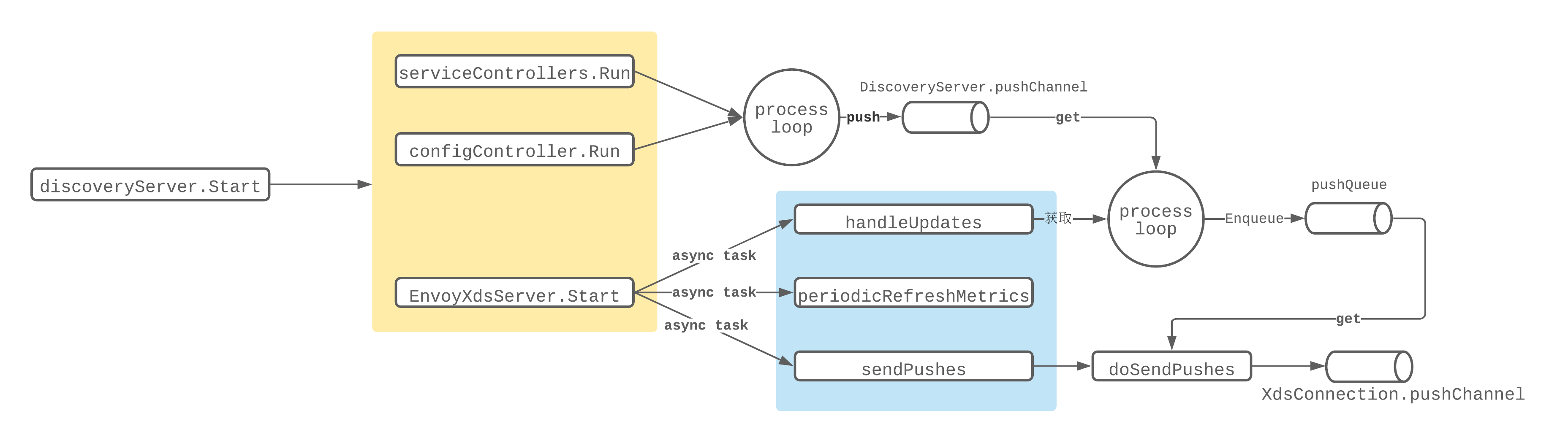
}遍历调用完毕后会分别启动server Controller和config Controller的run函数,以及调用xdsServer的Start方法,Start方法主要分别启动了三个线程:
func (s *DiscoveryServer) Start(stopCh <-chan struct{}) {
adsLog.Infof("Starting ADS server")
go s.handleUpdates(stopCh)
go s.periodicRefreshMetrics(stopCh)
go s.sendPushes(stopCh)
}比较重要的是handleUpdates方法和sendPushes方法。
handleUpdates方法主要是处理 pushChannel 中收到的推送请求,最后会调用startPush将数据推入到DiscoveryServer的pushQueue管道中;sendPushes方法则是获取pushQueue管道中的数据,封装成XdsEvent推入到XdsConnection的pushChannel进行异步处理。
handleUpdates
func (s *DiscoveryServer) handleUpdates(stopCh <-chan struct{}) {
debounce(s.pushChannel, stopCh, s.Push)
}
func debounce(ch chan *model.PushRequest, stopCh <-chan struct{}, pushFn func(req *model.PushRequest)) {
var timeChan <-chan time.Time
var startDebounce time.Time
var lastConfigUpdateTime time.Time
pushCounter := 0
debouncedEvents := 0
var req *model.PushRequest
free := true
freeCh := make(chan struct{}, 1)
push := func(req *model.PushRequest) {
pushFn(req)
freeCh <- struct{}{}
}
pushWorker := func() {
eventDelay := time.Since(startDebounce)
quietTime := time.Since(lastConfigUpdateTime)
// debounceMax为10s ,debounceAfter为100毫秒
//延迟时间大于等于最大延迟时间 或者 静默时间大于等于最小静默时间
if eventDelay >= debounceMax || quietTime >= debounceAfter {
if req != nil {
pushCounter++
adsLog.Infof("Push debounce stable[%d] %d: %v since last change, %v since last push, full=%v",
pushCounter, debouncedEvents,
quietTime, eventDelay, req.Full)
free = false
go push(req)
req = nil
debouncedEvents = 0
}
} else {
timeChan = time.After(debounceAfter - quietTime)
}
}
for {
select {
case <-freeCh:
free = true
pushWorker()
case r := <-ch:
// If reason is not set, record it as an unknown reason
if len(r.Reason) == 0 {
r.Reason = []model.TriggerReason{model.UnknownTrigger}
}
if !enableEDSDebounce && !r.Full {
// trigger push now, just for EDS
go pushFn(r)
continue
}
lastConfigUpdateTime = time.Now()
//首次进入会调用延时器 timeChan 先延迟一个最小静默时间(100 毫秒)
if debouncedEvents == 0 {
timeChan = time.After(debounceAfter)
startDebounce = lastConfigUpdateTime
}
debouncedEvents++
//合并请求
req = req.Merge(r)
case <-timeChan:
if free {
pushWorker()
}
case <-stopCh:
return
}
}
}handleUpdates是直接调用了debounce方法,并将pushChannel以及DiscoveryServer的Push函数传入内。
debounce这个方法里面的处理非常的有意思,我们下面来讲一下它的一个执行流程:
- 进入到这个方法的时候,pushWorker函数以及push函数都不会被立即调用,而是会走到一个for循环中,里面有select执行语句,这个for循环会一直等待,直到ch有数据
case r := <-ch被执行; - 首次进入到
case r := <-ch代码块的时候,debouncedEvents是等于0的,那么会直接调用time.After等待debounceAfter设置的时间,也就是100毫秒,被唤醒之后会将timeChan设值,并执行合并请求; - 第二次循环的时候会执行到
case <-timeChan这块逻辑中,执行pushWorker函数,在函数里面会判断是否等待超过了最大延迟时间debounceMax(10s)或 静默时间超过了debounceAfter(100ms),如果是的话,那么执行push函数,调用pushFn进行推送,并将freeCh设置一个空的结构体; - 下次循环的时候会执行到
case <-freeCh:这块逻辑中,再执行下次的pushWorker操作;
push方法会一直往下调用,直到把数据推入到DiscoveryServer的pushQueue管道中:

send Pushes
func (s *DiscoveryServer) sendPushes(stopCh <-chan struct{}) {
doSendPushes(stopCh, s.concurrentPushLimit, s.pushQueue)
}sendPushes会调用doSendPushes方法传入PushQueue,以及concurrentPushLimit,它是由环境变量 PILOT_PUSH_THROTTLE 控制的,默认为 100 。
func doSendPushes(stopCh <-chan struct{}, semaphore chan struct{}, queue *PushQueue) {
for {
select {
case <-stopCh:
return
default:
// 这里semaphore容量只有100,用来控制速率
semaphore <- struct{}{}
// Get the next proxy to push. This will block if there are no updates required.
client, info := queue.Dequeue()
recordPushTriggers(info.Reason...)
// Signals that a push is done by reading from the semaphore, allowing another send on it.
doneFunc := func() {
queue.MarkDone(client)
<-semaphore
}
proxiesQueueTime.Record(time.Since(info.Start).Seconds())
go func() {
edsUpdates := info.EdsUpdates
if info.Full {
// Setting this to nil will trigger a full push
edsUpdates = nil
}
select {
case client.pushChannel <- &XdsEvent{
push: info.Push,
edsUpdatedServices: edsUpdates,
done: doneFunc,
start: info.Start,
namespacesUpdated: info.NamespacesUpdated,
configTypesUpdated: info.ConfigTypesUpdated,
noncePrefix: info.Push.Version,
}:
return
case <-client.stream.Context().Done(): // grpc stream was closed
doneFunc()
adsLog.Infof("Client closed connection %v", client.ConID)
}
}()
}
}
}在doSendPushes方法内启动了一个无限循环,在default代码块中实现了主要的功能逻辑。semaphore参数可以看出是用来控制速率用的,当semaphore满了之后会阻塞。然后会启动一个线程将XdsEvent初始化后放入到pushChannel中。
总体来说流程如下:
- 从pushQueue出队一个xdsConnection;
- 然后初始化一个XdsEvent入队到xdsConnection的pushChannel管道中;
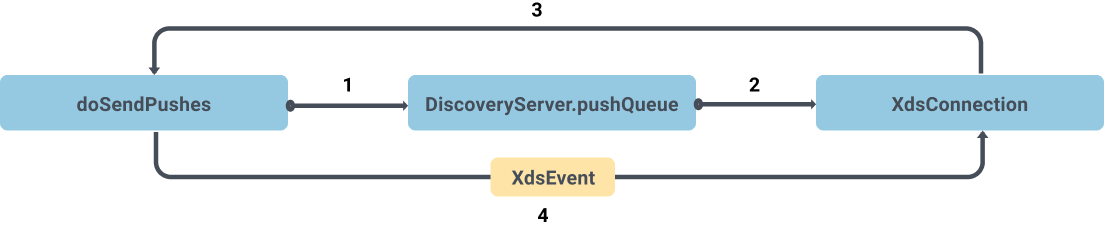
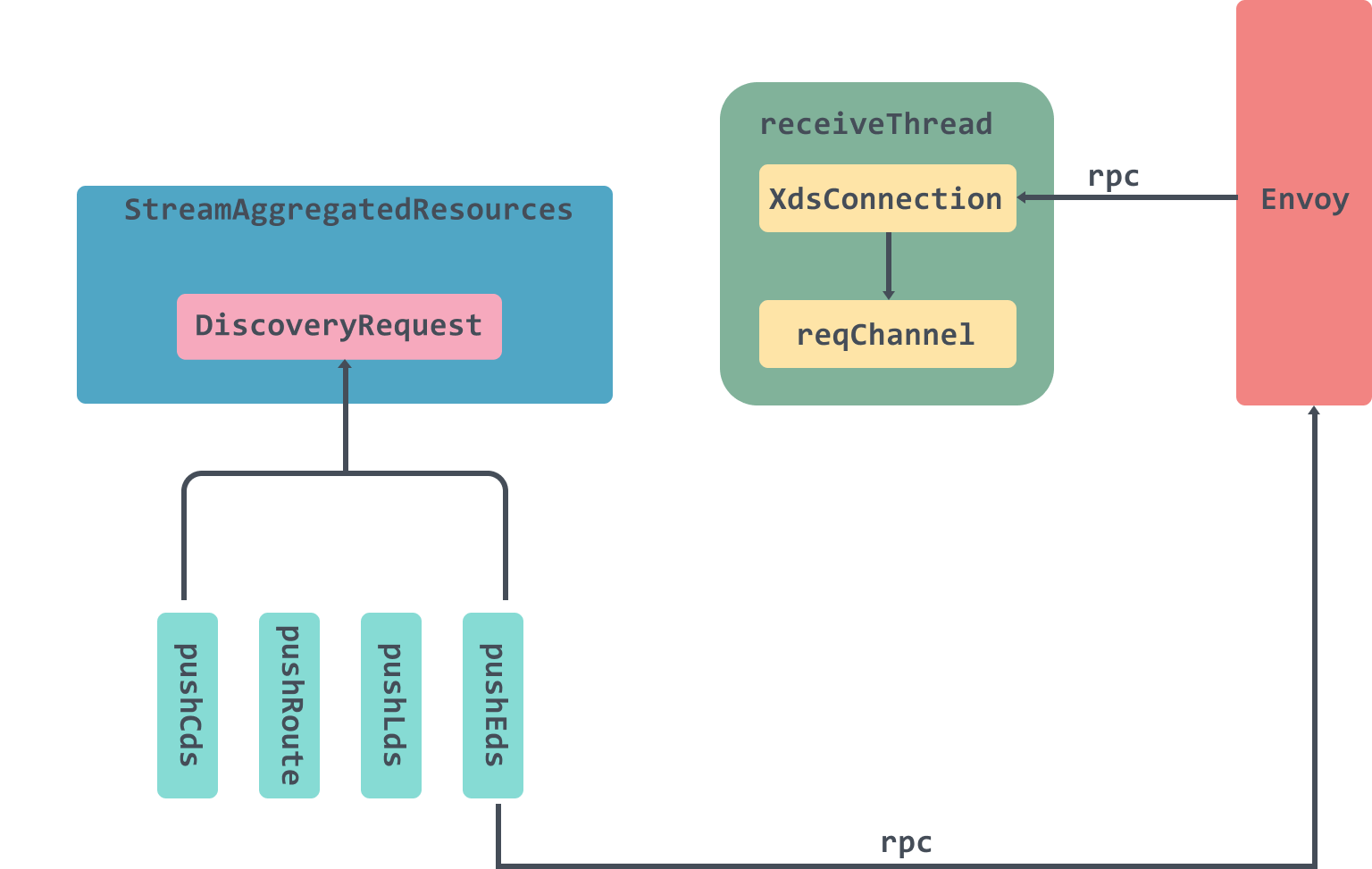
这里放入到pushChannel管道中的消息会在StreamAggregatedResources方法中被处理:
func (s *DiscoveryServer) StreamAggregatedResources(stream ads.AggregatedDiscoveryService_StreamAggregatedResourcesServer) error {
...
con := newXdsConnection(peerAddr, stream)
var receiveError error
reqChannel := make(chan *xdsapi.DiscoveryRequest, 1)
//从XdsConnection中接收来自Envoy的DiscoveryRequest
go receiveThread(con, reqChannel, &receiveError)
for {
select {
//reqChannel处理部分
case discReq, ok := <-reqChannel:
...
//pushChannel处理部分
case pushEv := <-con.pushChannel:
err := s.pushConnection(con, pushEv)
pushEv.done()
if err != nil {
return nil
}
}
}
}这里总体来说分为两部分,一个是 reqChannel的数据处理这部分稍放到Client Request中说,另一部分是pushChannel的数据处理。
在获取到pushChannel管道的数据后会调用pushConnection进行处理。
func (s *DiscoveryServer) pushConnection(con *XdsConnection, pushEv *XdsEvent) error {
//处理增量推送 EDS 的情况
if pushEv.edsUpdatedServices != nil {
if !ProxyNeedsPush(con.node, pushEv) {
adsLog.Debugf("Skipping EDS push to %v, no updates required", con.ConID)
return nil
}
if len(con.Clusters) > 0 {
if err := s.pushEds(pushEv.push, con, versionInfo(), pushEv.edsUpdatedServices); err != nil {
return err
}
}
return nil
}
...
currentVersion := versionInfo()
pushTypes := PushTypeFor(con.node, pushEv)
// 根据类型判断推送类型
if con.CDSWatch && pushTypes[CDS] {
err := s.pushCds(con, pushEv.push, currentVersion)
if err != nil {
return err
}
}
if len(con.Clusters) > 0 && pushTypes[EDS] {
err := s.pushEds(pushEv.push, con, currentVersion, nil)
if err != nil {
return err
}
}
if con.LDSWatch && pushTypes[LDS] {
err := s.pushLds(con, pushEv.push, currentVersion)
if err != nil {
return err
}
}
if len(con.Routes) > 0 && pushTypes[RDS] {
err := s.pushRoute(con, pushEv.push, currentVersion)
if err != nil {
return err
}
}
proxiesConvergeDelay.Record(time.Since(pushEv.start).Seconds())
return nil
}这里会根据pushEv的类型来判断,需要推送什么类型的配置信息,下面以EDS为例看一下pushEds里面做了什么:
func (s *DiscoveryServer) pushEds(push *model.PushContext, con *XdsConnection, version string, edsUpdatedServices map[string]struct{}) error {
pushStart := time.Now()
loadAssignments := make([]*xdsapi.ClusterLoadAssignment, 0)
endpoints := 0
empty := 0
for _, clusterName := range con.Clusters {
// 构建生成器生成 EDS
l := s.generateEndpoints(clusterName, con.node, push, edsUpdatedServices)
if l == nil {
continue
}
for _, e := range l.Endpoints {
endpoints += len(e.LbEndpoints)
}
if len(l.Endpoints) == 0 {
empty++
}
loadAssignments = append(loadAssignments, l)
}
//构建DiscoveryResponse
response := endpointDiscoveryResponse(loadAssignments, version, push.Version)
//发送响应
err := con.send(response)
edsPushTime.Record(time.Since(pushStart).Seconds())
...
return nil
}pushEds里面主要就是构建DiscoveryResponse,然后调用send方法发送响应。

Client Request
这部分的代码和上面的其实差不多,主要是数据的获取是从reqChannel管道中获取。
//从XdsConnection中接收来自Envoy的DiscoveryRequest
go receiveThread(con, reqChannel, &receiveError)
for {
select {
case discReq, ok := <-reqChannel:
if !ok {
// Remote side closed connection.
return receiveError
}
// This should be only set for the first request. Guard with ID check regardless.
if discReq.Node != nil && discReq.Node.Id != "" {
if cancel, err := s.initConnection(discReq.Node, con); err != nil {
return err
} else if cancel != nil {
defer cancel()
}
}
switch discReq.TypeUrl {
case ClusterType:
...
err := s.pushCds(con, s.globalPushContext(), versionInfo())
if err != nil {
return err
}
case ListenerType:
...
err := s.pushLds(con, s.globalPushContext(), versionInfo())
if err != nil {
return err
}
case RouteType:
...
con.Routes = routes
adsLog.Debugf("ADS:RDS: REQ %s %s routes:%d", peerAddr, con.ConID, len(con.Routes))
err := s.pushRoute(con, s.globalPushContext(), versionInfo())
if err != nil {
return err
}
case EndpointType:
...
err := s.pushEds(s.globalPushContext(), con, versionInfo(), nil)
if err != nil {
return err
}
default:
adsLog.Warnf("ADS: Unknown watched resources %s", discReq.String())
}
case pushEv := <-con.pushChannel:
...
}这部分会异步掉启动一个线程用来循环的接受grpc的请求,然后将数据存放到reqChannel管道中,然后在for循环中消费管道中的数据。
总结
到这里Pilot部分的源码解析就差不多结束了,回顾一下前两篇的内容,第一篇主要是讲通过service controller来监听Service、EndPoint、nodes、pods等资源的更新事件;第二篇主要是讲通过config controller来监听Istio的Gateway、DestinationRule及VirtualService等配置变动情况;这篇文章主要讲解了xDS协议管理服务器端是如何做的,通过接受service controller以及config controller中的消息,从中获取各种各样的资源变动情况,然后建立RPC连接Envoy端的,并告知配置变动。
Reference
https://www.servicemesher.com/blog/istio-analysis-4/
https://zhaohuabing.com/post/2019-10-21-pilot-discovery-code-analysis/
https://jimmysong.io/blog/service-mesh-the-microservices-in-post-kubernetes-era/
https://blog.gmem.cc/interaction-between-istio-pilot-and-envoy
https://www.envoyproxy.io/docs/envoy/latest/api-docs/xds_protocol